:::
MTD
- A-Font-Size:Small
- AFont-Size:Middle
- A+Font-Size:Large
Underwater Structure Inspection Lab
Highlight:First foundation inspection lab in Taiwan
Technical services
- Development and integration technologies for auxiliary systems required in underwater vehicle development, including structural design analysis, drag simulation, dynamic control against ocean currents, underwater image processing, and target tracking.
- A work-class underwater vehicle (ROV) equipped with robotic arms and specialized tools for underwater structural marine organism removal, structural corrosion mitigation, and undersea cable/pipeline inspection and analysis.
- Cable condition detection techniques, such as seabed terrain morphology modeling, magnetic field analysis, and undersea cable location detection.
R&D focus
- .ROV Auxiliary System Development: Development of a current-resistant auxiliary platform and an integrated control system for underwater image enhancement and target tracking.
- Sonar System Application Technology: Including underwater positioning, underwater communication, geological exploration, and image processing software.
- Underwater Structure Inspection: Techniques for detecting structural corrosion and assessing undersea cable exposure, displacement, and magnetic conditions.
- Offshore Wind Farm Inspection: Technologies for seabed mapping, monitoring seabed scour and morphological changes, as well as cable search and tracking.
Main Equip.

Side scan、Multibeam sona
- Side scan : 230/540 KHz
- Multibeam sonar : 230 KHz
- Autonomous Surface Vehicles, ASV
- Image processing software
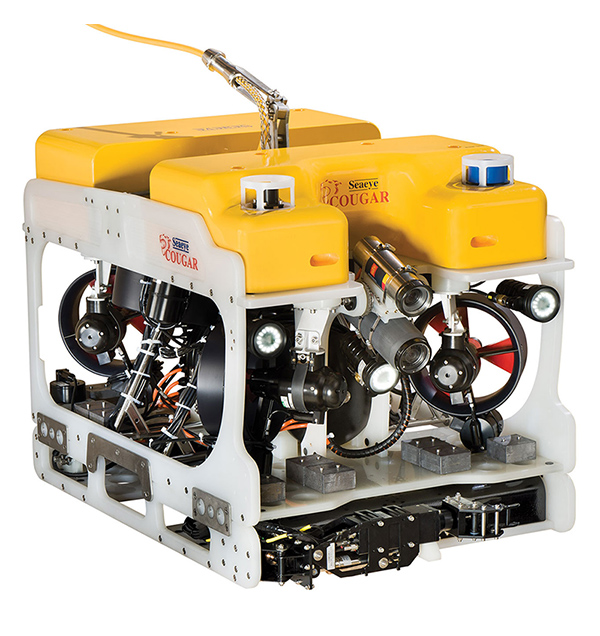
Remotely Operated Vehicle, ROV - Remotely Operated Vehicle, ROV
- Weight : 300kg
- Depth rating : 300msw
- Payload : 60kg
- Thrust forward : 170kgf
- Thrust lateral : 120kgf
- Thrust vedrtical : 110kgf
- Forward speed : 3.8knots
- Power : 380 VAC 3Ø 60Hz